Ein Roboter mit Laserblick
Präzise Positionierung mit dem Sensor- und Software-System von norisTEC

Quelle: norisTEC F&E
Die exakte Positionierung von Werkzeug und Werkstück zählt zu den anspruchsvollsten Aufgaben in der Automatisierung. Besonders bei flexiblen Robotersystemen entscheidet die Genauigkeit darüber, ob eine Bearbeitung reproduzierbar, effizient und wirtschaftlich bleibt.
Die norisTEC GmbH hat hierfür ein innovatives System aus Hardwarekomponenten und einer modularen Softwaretoolbox entwickelt – ein echtes Laserauge für den Roboter.
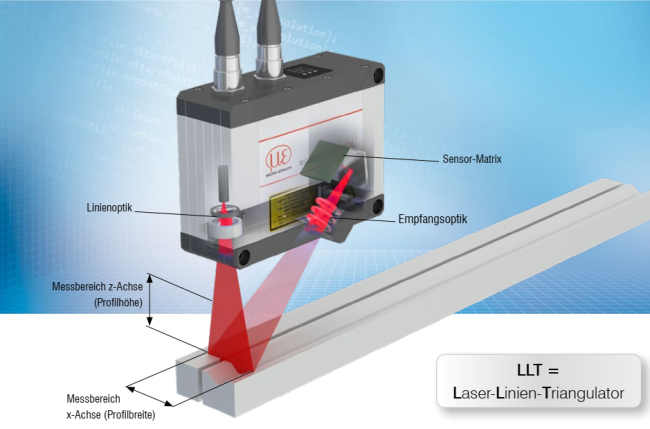
Das System ermöglicht es, das Werkzeug eines 6‑Achs-Knickarmroboters hochpräzise zum Bearbeitungsobjekt berührungslos, schnell und ohne aufwändige Kalibrierung auszurichten. Kernstück ist ein Laser-Linien-Triangulator (LLT), der mit beeindruckender Auflösung und Genauigkeit Höhenprofile und Kantenstrukturen des Werkstücks erfasst. Im Zusammenspiel mit der noris
TEC-Software entsteht ein digitales Abbild der Umgebung, das dem Roboter millimetergenaue Orientierung gibt.
Warum ein Lasertriangulator statt einer Kamera?
Während kamerabasierte Systeme oft empfindlich auf Fremdlicht reagieren und abgeschirmte Messkammern benötigen, arbeitet der Lasertriangulator nahezu unabhängig von Umgebungslicht.
Seine konzentrierte Lichtlinie liefert selbst bei kurzen Belichtungszeiten gestochen scharfe Höhenprofile, ganz ohne Lichtkammer oder Spezialbeleuchtung.
„Die Kamera hat quasi eine Sonnenbrille auf und sieht nur den sehr hellen Laser“, so die Aussage eines Entwicklers.
Ein weiterer Vorteil: Das integrierte Auswertesystem im Sensor rechnet das erfasste Höhenprofil direkt in echte Positionswerte in Millimeter um – Verzerrungen wie bei herkömmlichen Kameraoptiken entfallen bzw. werden durch die spezialisierte Sensorsoftware schon kompensiert. Damit erfolgt bereits im Sensor selbst eine Art Online-Vorverarbeitung und Skalierung.
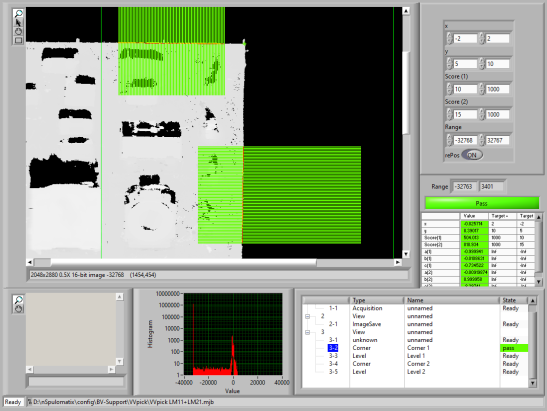
Lernfähig – dank eigenem spezialisierten norisTEC– Bildverarbeitungstoolkit (NI Vision)
Nach dem Überstreichen von Bauteilen mit der Laserlinie wird ein 3D-Profilbild erzeugt und in die Bildverarbeitung geladen. Dabei erfolgt eine Reduktion auf ein Pseudo-2D-Höhenbild, welches mit verschiedenen wählbaren Modulen aus dem norisTEC-BV-Toolkit, auf Basis von NI Vision, weiterverarbeitet werden kann.
Quelle: norisTEC F&E
Durch geschickte Kombination dieser Module (Kantenerkennung, Linieninterpolation, Schnittkanten-Berechnung, Flächenermittlung und vieles mehr) können aus dem Bild Markierungspunkte ermittelt werden, die zurückgespiegelt als Lagekorrektur für den Roboter dienen. Diese Module können bedienerseitig in der Anwendung auf Bauteile gelernt bzw. auch immer nachgelernt sowie erweitert und umgestellt werden. Hierzu gibt es eine intuitive Bedienoberfläche. Damit kann der Roboter dann quasi im Submillimeterbereich genau sehen, wo er greifen muss. Er hat dadurch den Laserblick.
Präzision aus einer Hand – Hardware und Software perfekt verzahnt
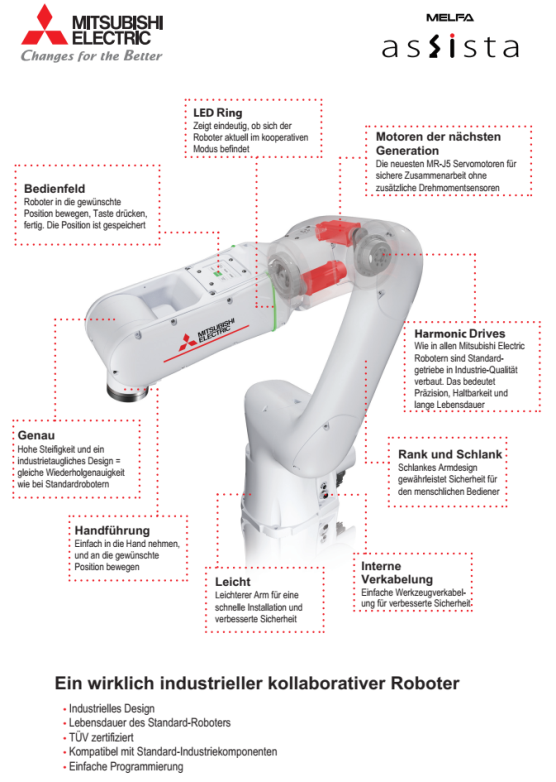
Quelle: Mitsubishi Electric Europe B.V.
Die Lösung ist für die gesamte Mitsubishi-MELFA-Roboterfamilie ausgelegt, lässt sich aber auch auf Systeme anderer Hersteller adaptieren.
In der aktuellen Anwendung kommt ein MITSUBISHI ELECTRICMELFA ASSISTA RV-5AS‑D zum Einsatz – ein kollaborierender Roboter, der die Präzision klassischer Industrieroboter mit der Sicherheit und Flexibilität eines Cobots vereint.
Das System kann in zwei Hardwarevarianten konfiguriert werden:
- Variante 1: Der Lasertriangulator ist dauerhaft am Roboterarm verbaut; Werkzeuge wie Schraubendreher, Fräser oder Prüffinger werden mit festem Bezug montiert. Die genaue Positionsbeziehung zwischen Laser und Werkzeug wird einmalig kalibriert.
- Variante 2: Laser und Werkzeuge können über ein automatisches Werkzeugwechselsystem im Prozess flexibel angedockt werden.
Flexibilität trifft Sicherheit – Automatischer Werkzeugwechsel mit System
Parallel zur Sensorlösung hat norisTEC ein komplettes Konzept für den sicheren, automatischen Werkzeugwechsel entwickelt.
Über ein pneumatisch gesteuertes Standardsystem von Schunk werden die unterschiedlichen Roboterhände – inklusive der „Scannerhand“ – angedockt. Ergänzend entstand ein eigens entwickeltes Werkzeugparksystem mit verriegelten, federgestützten und sicherheitsüberwachten Parkstationen.
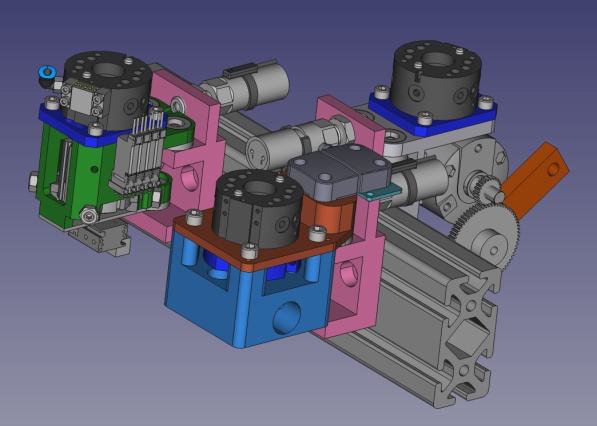
Quelle: norisTEC F&E + Konrad Lechner GmbH & Co. KG
So kann der (kollaborierende) Roboter auch „gefährliche“ Werkzeuge aufnehmen, ohne die Sicherheit des Bedieners zu gefährden: Das System wechselt automatisch zwischen kollaborierendem und Hochgeschwindigkeitsmodus, abhängig von Werkzeug und Betriebszustand (Schutztürzustand).
Eine farbliche Signalisierung des Roboters informiert den Bediener stets über den aktuellen Betriebsmodus. Öffnet der Anwender während einer Hochgeschwindigkeitsoperation eine Schutztür, stoppt der Roboter sicher – betritt er den Schutzbereich während des kollaborierenden Betriebs, reduziert der Roboter automatisch seine Geschwindigkeit.
Durchdachte Integration – bis ins Kabelmanagement
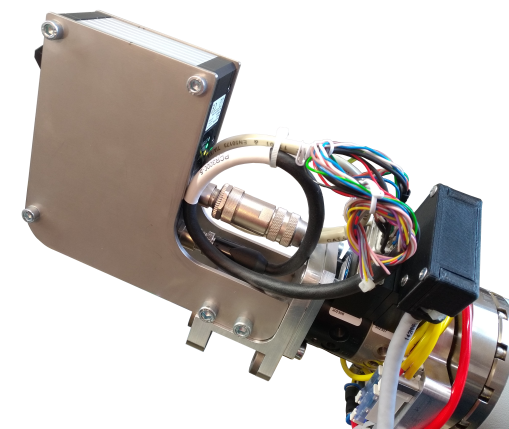
Quelle: norisTEC F&E
Um das System so kompakt und robust wie möglich zu gestalten, entwickelte norisTEC außerdem ein internes Multiplex-System für die Signalführung des MELFA ASSISTA.
Je nach montierter Roboterhand kann das gleiche interne Kabelpaket als Gigabit-Ethernet-Leitung, als digitale I/O‑Verbindung oder zur Ansteuerung von Pneumatikventilen genutzt werden – automatisch umgeschaltet über den Robotercontroller.
Damit entfallen störende Außenkabel, und der Handwechsel erfolgt spannungsfrei und zuverlässig.
Sogar der ASSISTA selbst wurde optimiert: Eine der werksseitigen Elektroleitungen wurde durch eine Pneumatikleitung ersetzt, sodass alle Versorgungen nun innenliegend bis zur Werkzeugaufnahme und über den automatischen Wechselflansch geführt werden. Das Ergebnis ist eine saubere, platzsparende und industrietaugliche Lösung.
Fazit
Mit der Kombination aus Lasertriangulator, intelligenter Software und durchdachter Systemintegration hat norisTEC ein Werkzeug geschaffen, das Robotern das Sehen lehrt – präzise, robust und flexibel.
Ob für das exakte Positionieren, Prüfen oder Montieren – das System bietet eine Lösung, die den Übergang zwischen klassischer Industrieautomation und moderner kollaborierenden Robotik nahtlos meistert.